




































-
1
-
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
해당 자료는 10페이지 까지만 미리보기를 제공합니다.
10페이지 이후부터 다운로드 후 확인할 수 있습니다.
10페이지 이후부터 다운로드 후 확인할 수 있습니다.




목차
1. 실험목적
2. FARA ROBOT의 구성
3. FARA ROBOT의 특징
4. 주의사항
5. 명령어 정의
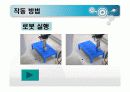
6. 작동방법
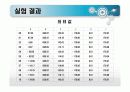
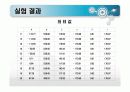
7. 실험 결과
8. 실험 소감
2. FARA ROBOT의 구성
3. FARA ROBOT의 특징
4. 주의사항
5. 명령어 정의
6. 작동방법
7. 실험 결과
8. 실험 소감
본문내용
실험목적
○ FARAL 언어를 이용하여 FARA 로봇을 제어.
○로봇 제어장치와 조작방법을 이해하여 로봇의 효과적인
움직임 생성.
○사용자가 원하는 좌표, 프로그램, 이동경로 순으로 ROBOT
말단 장치의 위치와 방향을 제어.
○ 작동 시스템을 이해하여 프로그래밍 하는데 최종 목표.
○ FARAL 언어를 이용하여 FARA 로봇을 제어.
○로봇 제어장치와 조작방법을 이해하여 로봇의 효과적인
움직임 생성.
○사용자가 원하는 좌표, 프로그램, 이동경로 순으로 ROBOT
말단 장치의 위치와 방향을 제어.
○ 작동 시스템을 이해하여 프로그래밍 하는데 최종 목표.
키워드
추천자료
- 가격3,000원
- 페이지수30페이지
- 등록일2009.05.20
- 저작시기2009.5
- 파일형식파워포인트(ppt)
- 자료번호#536316

본 자료는 최근 2주간 다운받은 회원이 없습니다.



