

















































-
1
-
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
-
24
-
25
-
26
-
27
-
28
-
29
-
30
-
31
-
32
-
33
-
34
-
35
-
36
-
37
-
38
-
39
-
40
-
41
-
42
-
43
-
44
-
45
해당 자료는 10페이지 까지만 미리보기를 제공합니다.
10페이지 이후부터 다운로드 후 확인할 수 있습니다.
10페이지 이후부터 다운로드 후 확인할 수 있습니다.




본문내용
로봇의 정의
1.로봇의 정의로서 일반적으로 널리 인정되고 있는 말은 아
직 없다고 말할 수 있다. 그렇지만 로봇의 개념은 고대신화
시대부터 있었으며 현재도 소설이나 만화 등에서 널리 쓰이
고 있기 때문에 누구라도 로봇에 대해서는 어떠한 이미지를
가지고 있다. 그런 반면 로봇 기술은 급속히 진보발전해 가
고 있기 때문에 로봇이라는 말이 나타내는 기술개념은 현시
점에서 계속 변화 확대해가고 있는 셈이다. 현재의 로봇은
여러 목적의 로봇(해저, 우주탐사 등)중에서도 주로 산업에
서 사용되는 산업용 로봇을 칭한다. 그외 로봇은 사전이나
공상과학 등에서 \"기계인간\"으로 정의되는 경우가 많으나,
이는 좀 더실용적인 측면으로 정의되는 것이 바람직할 것이
다.
로봇의 어원
'Robot'이라는 말은 1921년 체코슬로바키아의 극작가
Karel Capek의 희곡 R.U.R.(Rosuum' s UniversialRobots)
에서 처음 사용되었다. 로봇의 어원은 체코어의 노동을 의
미하는 단어 'robota‘에서 나왔다고 알려지고 있다. Capek
는 그의 R.U.R. 중에서 모든 작업능력에서 인간과 동등하거
나 그 이상이면서 인간적「감정」이나 「혼」을 가지고 있
지 않은 로봇이라고 불리우는 인조인간을 등장시키고 있다.
로봇은 언젠가 쇠조각으로 변하여 반항하는 정신을 발달시
킴으로서 자신들의 창조주인 인간을 전부 죽여 버린다고 하
는 비극을 인상적으로 나타내고 있다.
로봇의 정의
2.그 외 로봇의 정의
역사적인 정의 : 공포를 주거나 유머스런 행동을 하는 융통성이 없는 기
계 인간
일반적인 정의 : 인간이상의 능력을 가지고 인간을 지키는 철인 아톰과
같은 일종의 이상적인 기계
Karel Capek의 정의 : 일할 수 있는 능력은 있어도 생각할 수 있는 능력
이 없는 인간을 닮은 것
퀸·메리 대학의 스링그 교수의 정의 : 팔과 손을 가지고, 인간에게 프로
그램 되어져서 여러 가지 연속 동작이나 운반 작업을 하고, 주위를 잘
보고, 애초부터 결정된 방법으로, 자기의 운동을 조절하여 움직일 수 있
는 기계
스링그 교수에 의한 로봇의 조건 : 인간에게 복종할 것 물건을 잡거나 운반할 수 있을 것
주의 상황의 변화에 응할 수 있을 것
자기 스스로 움직여 돌아다닐 것
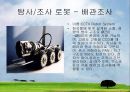
탐사/조사 로봇 - 우주탐사
이름:Nomad
어떠한 환경에서도 적응할 수 있도록 설계된 4륜 구동의 이동로봇이다. 단번에 회전할 수 있고 매우 넓은 시야범위에 대해 높은 품질의 영상을 보이는 혁신적인 Panospheric 카메라로 영상을 전송한다. DGPS라는 시스템을 사용하여 20cm 정밀도로 정확하게 원하는 위치로 이동할 수 있으며, 정교한 센서 장치 덕택에 지구와의 정보 교환에서 생기는 시간지연에 대한 위험이 없다. 장애물을 인식하여 디지털 지도 상에서 경로를 계획하고 움직인다. 이를 위해 이동속도는 0.2m/s로 제한하였다.
탐사/조사 로봇 - 우주탐사
이름:Nomad
어떠한 환경에서도 적응할 수 있도록 설계된 4륜 구동의 이동로봇이다. 단번에 회전할 수 있고 매우 넓은 시야범위에 대해 높은 품질의 영상을 보이는 혁신적인 Panospheric 카메라로 영상을 전송한다. DGPS라는 시스템을 사용하여 20cm 정밀도로 정확하게 원하는 위치로 이동할 수 있으며, 정교한 센서 장치 덕택에 지구와의 정보 교환에서 생기는 시간지연에 대한 위험이 없다. 장애물을 인식하여 디지털 지도 상에서 경로를 계획하고 움직인다. 이를 위해 이동속도는 0.2m/s로 제한하였다.
1.로봇의 정의로서 일반적으로 널리 인정되고 있는 말은 아
직 없다고 말할 수 있다. 그렇지만 로봇의 개념은 고대신화
시대부터 있었으며 현재도 소설이나 만화 등에서 널리 쓰이
고 있기 때문에 누구라도 로봇에 대해서는 어떠한 이미지를
가지고 있다. 그런 반면 로봇 기술은 급속히 진보발전해 가
고 있기 때문에 로봇이라는 말이 나타내는 기술개념은 현시
점에서 계속 변화 확대해가고 있는 셈이다. 현재의 로봇은
여러 목적의 로봇(해저, 우주탐사 등)중에서도 주로 산업에
서 사용되는 산업용 로봇을 칭한다. 그외 로봇은 사전이나
공상과학 등에서 \"기계인간\"으로 정의되는 경우가 많으나,
이는 좀 더실용적인 측면으로 정의되는 것이 바람직할 것이
다.
로봇의 어원
'Robot'이라는 말은 1921년 체코슬로바키아의 극작가
Karel Capek의 희곡 R.U.R.(Rosuum' s UniversialRobots)
에서 처음 사용되었다. 로봇의 어원은 체코어의 노동을 의
미하는 단어 'robota‘에서 나왔다고 알려지고 있다. Capek
는 그의 R.U.R. 중에서 모든 작업능력에서 인간과 동등하거
나 그 이상이면서 인간적「감정」이나 「혼」을 가지고 있
지 않은 로봇이라고 불리우는 인조인간을 등장시키고 있다.
로봇은 언젠가 쇠조각으로 변하여 반항하는 정신을 발달시
킴으로서 자신들의 창조주인 인간을 전부 죽여 버린다고 하
는 비극을 인상적으로 나타내고 있다.
로봇의 정의
2.그 외 로봇의 정의
역사적인 정의 : 공포를 주거나 유머스런 행동을 하는 융통성이 없는 기
계 인간
일반적인 정의 : 인간이상의 능력을 가지고 인간을 지키는 철인 아톰과
같은 일종의 이상적인 기계
Karel Capek의 정의 : 일할 수 있는 능력은 있어도 생각할 수 있는 능력
이 없는 인간을 닮은 것
퀸·메리 대학의 스링그 교수의 정의 : 팔과 손을 가지고, 인간에게 프로
그램 되어져서 여러 가지 연속 동작이나 운반 작업을 하고, 주위를 잘
보고, 애초부터 결정된 방법으로, 자기의 운동을 조절하여 움직일 수 있
는 기계
스링그 교수에 의한 로봇의 조건 : 인간에게 복종할 것 물건을 잡거나 운반할 수 있을 것
주의 상황의 변화에 응할 수 있을 것
자기 스스로 움직여 돌아다닐 것
탐사/조사 로봇 - 우주탐사
이름:Nomad
어떠한 환경에서도 적응할 수 있도록 설계된 4륜 구동의 이동로봇이다. 단번에 회전할 수 있고 매우 넓은 시야범위에 대해 높은 품질의 영상을 보이는 혁신적인 Panospheric 카메라로 영상을 전송한다. DGPS라는 시스템을 사용하여 20cm 정밀도로 정확하게 원하는 위치로 이동할 수 있으며, 정교한 센서 장치 덕택에 지구와의 정보 교환에서 생기는 시간지연에 대한 위험이 없다. 장애물을 인식하여 디지털 지도 상에서 경로를 계획하고 움직인다. 이를 위해 이동속도는 0.2m/s로 제한하였다.
탐사/조사 로봇 - 우주탐사
이름:Nomad
어떠한 환경에서도 적응할 수 있도록 설계된 4륜 구동의 이동로봇이다. 단번에 회전할 수 있고 매우 넓은 시야범위에 대해 높은 품질의 영상을 보이는 혁신적인 Panospheric 카메라로 영상을 전송한다. DGPS라는 시스템을 사용하여 20cm 정밀도로 정확하게 원하는 위치로 이동할 수 있으며, 정교한 센서 장치 덕택에 지구와의 정보 교환에서 생기는 시간지연에 대한 위험이 없다. 장애물을 인식하여 디지털 지도 상에서 경로를 계획하고 움직인다. 이를 위해 이동속도는 0.2m/s로 제한하였다.
추천자료
- 가격2,000원
- 페이지수45페이지
- 등록일2015.03.10
- 저작시기2015.3
- 파일형식파워포인트(ppt)
- 자료번호#958833

본 자료는 최근 2주간 다운받은 회원이 없습니다.




소개글