
























-
1
-
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
해당 자료는 5페이지 까지만 미리보기를 제공합니다.
5페이지 이후부터 다운로드 후 확인할 수 있습니다.
5페이지 이후부터 다운로드 후 확인할 수 있습니다.




목차
1. 연구 동기
2. 연구내용
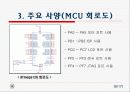
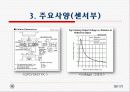
3. 주요사양
4. 회로도 및 부품 배치도
5. 추진 일정
6. 작품 사진
2. 연구내용
3. 주요사양
4. 회로도 및 부품 배치도
5. 추진 일정
6. 작품 사진
본문내용
1. 연구동기
◆현재 관련 분야에 대한 관심이 증가하는 추세
◆MCU의 이해, 센서 구동원리 파악이 목적
◆MCU제어 능력을 익히고 좀더 하드웨어 부분에 관한 연구
◆앞으로 여러 분야에서 사용이 될 것이고 발전 가능성이 충분한 분야로써 관심이 집중(ex : 자동차 산업 등에서 발전 가능성)
2. 연구내용
◆적외선 센서를 이용하여 장애물을 효율적으로 인식
◆적외선 센서의 측정값을 이용하여 모터 구동 방법
◆MCU를 제어 하는 방법 및 효율적인 프로그램 제작
◆기본적인 하드웨어 제작에 관한 효율적인 방법
◆현재 관련 분야에 대한 관심이 증가하는 추세
◆MCU의 이해, 센서 구동원리 파악이 목적
◆MCU제어 능력을 익히고 좀더 하드웨어 부분에 관한 연구
◆앞으로 여러 분야에서 사용이 될 것이고 발전 가능성이 충분한 분야로써 관심이 집중(ex : 자동차 산업 등에서 발전 가능성)
2. 연구내용
◆적외선 센서를 이용하여 장애물을 효율적으로 인식
◆적외선 센서의 측정값을 이용하여 모터 구동 방법
◆MCU를 제어 하는 방법 및 효율적인 프로그램 제작
◆기본적인 하드웨어 제작에 관한 효율적인 방법
추천자료
- 가격2,000원
- 페이지수17페이지
- 등록일2011.05.19
- 저작시기2011.4
- 파일형식파워포인트(ppt)
- 자료번호#678553

본 자료는 최근 2주간 다운받은 회원이 없습니다.


