



























-
1
-
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
해당 자료는 5페이지 까지만 미리보기를 제공합니다.
5페이지 이후부터 다운로드 후 확인할 수 있습니다.
5페이지 이후부터 다운로드 후 확인할 수 있습니다.




목차
서론 – 동기, 배경, 목적
본론 – 마이크로프로세서, 센서부, 구동부, LCD
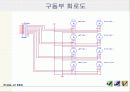
결과 – ISP 케이블, 구동원리, 장애물인식 알고리즘, 워킹 알고리즘, 몸체 제작, 회로도 설명, 내장 프로그램 설명
결론
졸업작품 후기
본론 – 마이크로프로세서, 센서부, 구동부, LCD
결과 – ISP 케이블, 구동원리, 장애물인식 알고리즘, 워킹 알고리즘, 몸체 제작, 회로도 설명, 내장 프로그램 설명
결론
졸업작품 후기
본문내용
동기
6족 개미 로봇은 위험하고 인간이 접근하기 어려운 환경에서의 여러 가지 작업을 위하여 운동성 및 뛰어남
동적 안정성이 뛰어나 다기능적인 응용이 가능함목적
우리가 제작한 로봇이 실제적으로 산업 현장에 쓰이거나 실용적으로 사용되지는 않겠지만 이를 통하여 우리는 그 동안 수업시간에 책에서만 공부해왔던 전자회로, 마이크로 프로세서, 컴퓨터 구조, 제어계측 등 많은 부분을 실제적으로 구현하면서 이론에 치중해 왔던 그 동안의 학습을 보완할 수 있을 것이라 기대한다.
6족 개미 로봇은 위험하고 인간이 접근하기 어려운 환경에서의 여러 가지 작업을 위하여 운동성 및 뛰어남
동적 안정성이 뛰어나 다기능적인 응용이 가능함목적
우리가 제작한 로봇이 실제적으로 산업 현장에 쓰이거나 실용적으로 사용되지는 않겠지만 이를 통하여 우리는 그 동안 수업시간에 책에서만 공부해왔던 전자회로, 마이크로 프로세서, 컴퓨터 구조, 제어계측 등 많은 부분을 실제적으로 구현하면서 이론에 치중해 왔던 그 동안의 학습을 보완할 수 있을 것이라 기대한다.
추천자료
 [프로젝트결과보고서] 우리들만의 기능성 RC카 만들기
[프로젝트결과보고서] 우리들만의 기능성 RC카 만들기 [자바프로젝트]주차장 관리 프로그램
[자바프로젝트]주차장 관리 프로그램- 구안학습(프로젝트학습)의 개념, 구안학습(프로젝트학습)의 특성, 구안학습(프로젝트학습)의 ...
- 온라인프로젝트학습(웹기반프로젝트학습)의 의의와 유형, 온라인프로젝트학습(웹기반프로젝트...
- 프로젝트기반학습(PBL, 프로젝트중심수업) 개념과 배경, 프로젝트기반학습(PBL, 프로젝트중심...
- 프로젝트기반학습(PBL, 프로젝트수업)의 의미와 유형, 프로젝트기반학습(PBL, 프로젝트수업)...
- 프로젝트기반학습(프로젝트수업, PBL) 의의와 목적, 프로젝트기반학습(프로젝트수업, PBL) 발...
- [프로젝트관리][프로젝트관리 방법][프로젝트관리 과제]프로젝트관리의 개념, 프로젝트관리의...
- [온라인협동학습][온라인프로젝트학습][온라인토론학습][온라인교육훈련][온라인학습지][인터...
- 프로젝트 관리의 행동주의적인 측면에 대해 서술
- [공공미술과도시환경] 한국형 공공미술의 실제와 전망 - 공공미술 사례분석(안양공공예술프로...
- 가격2,300원
- 페이지수17페이지
- 등록일2006.01.06
- 저작시기2006.01
- 파일형식파워포인트(ppt)
- 자료번호#331625

본 자료는 최근 2주간 다운받은 회원이 없습니다.



소개글