


























-
1
-
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
해당 자료는 5페이지 까지만 미리보기를 제공합니다.
5페이지 이후부터 다운로드 후 확인할 수 있습니다.
5페이지 이후부터 다운로드 후 확인할 수 있습니다.




목차
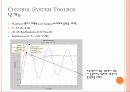
Control System Toolbox 정의
Control System Toolbox 제어시스템 구현
747 제트기의 횡운동 감쇠제어기 설계
Control System Toolbox 단계
Control System Toolbox 제어시스템 구현
747 제트기의 횡운동 감쇠제어기 설계
Control System Toolbox 단계
본문내용
제어시스템의 설계, 해석 및 모델링 기법을 구현한 m-file 로 작성된 알고리즘의 모임
MATLAB을 기반으로 제어공학을 위한 여러함수들을 포함.
747 제트기의 횡운동 감쇠제어기 설계
상태변수는 옆 미끄러짐 각도 β, yaw rate, roll rate 및 횡경사 각도 Φ
입력변수는 방향타와 보조날개의 변이
출력변수는 yaw rate 와 bank angle
먼저 명령어 “ss” 를 사용하여 747제트기 모델지정 및 상태변수와 입출력변수 이름을 지정한다.
>> sys = ss(A,B,C,D);
>> states ={'beta' 'yaw' 'roll' 'phi'};
>> inputs = {'rudder' 'aileron'};
>> outputs = {'yaw' 'bank angle'};
>> sys =ss(A,B,C,D,'statename',states,
'inputname',inputs,'outputname',outputs);
MATLAB을 기반으로 제어공학을 위한 여러함수들을 포함.
747 제트기의 횡운동 감쇠제어기 설계
상태변수는 옆 미끄러짐 각도 β, yaw rate, roll rate 및 횡경사 각도 Φ
입력변수는 방향타와 보조날개의 변이
출력변수는 yaw rate 와 bank angle
먼저 명령어 “ss” 를 사용하여 747제트기 모델지정 및 상태변수와 입출력변수 이름을 지정한다.
>> sys = ss(A,B,C,D);
>> states ={'beta' 'yaw' 'roll' 'phi'};
>> inputs = {'rudder' 'aileron'};
>> outputs = {'yaw' 'bank angle'};
>> sys =ss(A,B,C,D,'statename',states,
'inputname',inputs,'outputname',outputs);
추천자료
- 가격1,500원
- 페이지수17페이지
- 등록일2010.12.28
- 저작시기2010.9
- 파일형식파워포인트(ppt)
- 자료번호#645561

본 자료는 최근 2주간 다운받은 회원이 없습니다.


