































-
1
-
2
-
3
-
4
-
5
-
6
-
7
-
8
-
9
-
10
-
11
-
12
-
13
-
14
-
15
-
16
-
17
-
18
-
19
-
20
-
21
-
22
-
23
해당 자료는 8페이지 까지만 미리보기를 제공합니다.
8페이지 이후부터 다운로드 후 확인할 수 있습니다.
8페이지 이후부터 다운로드 후 확인할 수 있습니다.




목차
1. 연구목적
2. 연구 과제 수행 과정 및 방법
3. 업무 분담
4. 제작 일정
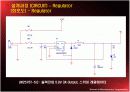
5. 설계 과정
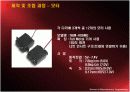
6. 제작 및 조립 과정
7. 완성
2. 연구 과제 수행 과정 및 방법
3. 업무 분담
4. 제작 일정
5. 설계 과정
6. 제작 및 조립 과정
7. 완성
본문내용
본 로봇의 미션은 자갈밭이나 모래가 많이 쌓인 Terrain(지역,지대) 즉, 보통의 라인트레이서로는 도달 불가능한 곳까지 무거운 자재나 운반물을 수송하는 것이다. 구현 방식으로는 AVR Atmega 128을 기반으로 하여 서보모터를 구동 및 제어하고, 무선 리모컨으로 적외선 통신을 활용하는 것이다.
추천자료
 김동인 연구(그의 생애와 작품을 중심으로)
김동인 연구(그의 생애와 작품을 중심으로)- 김동인 연구 <그의 생애와 작품 연구를 중심으로>
- 미당 서정주의 생애와 활동 및 작품경향 비평
- 안부공방 の女(사노녀)-작품 줄거리,본문내용,해설.
- [한국근대문학]박경리의 문학세계와 작품 분석(김약국의 딸들,시장과 전장 분석)
- 강신재 < 젊은 느티나무 > 작품분석과 소설지도 방법에 대한 연구
- 이호철의 「닳아지는 살들」작품분석과 지도론
- 유치진의 사실주의 연극 소 작품분석
- [한국현대문학A+] 정미경 작가소개와 주요작품분석 및 등장인물분석
 채만식-작가연보, 연구사검토, 주요작품과 특징
채만식-작가연보, 연구사검토, 주요작품과 특징 나다니엘 호손(Nathaniel Hawthorne)작품과 인생 정리
나다니엘 호손(Nathaniel Hawthorne)작품과 인생 정리- 김수영 [김수영 생애, 김수영 작품관, 김수영 발자취, 김수영 감상]
- 김종광_김씨네푸닥거리약사 (2004올해의문제소설) 작품분석
- 현대문학사 - 이상, 그의 생애와 작품세계
- 가격5,000원
- 페이지수23페이지
- 등록일2008.12.27
- 저작시기2008.10
- 파일형식파워포인트(ppt)
- 자료번호#509829

본 자료는 최근 2주간 다운받은 회원이 없습니다.




소개글